Application of neural networks in vehicle simulation as a substitute for driver models
Abstract
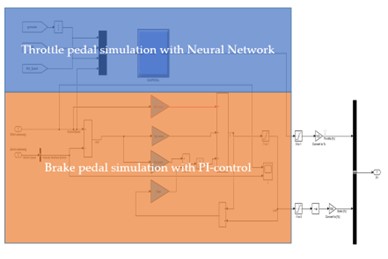
The development and optimization of vehicle simulation models is essential for the virtual validation of new features during vehicle development. New challenges are emerging that require the application and use of innovative solutions. The use and development of artificial intelligence methods can accelerate development processes, which will require a broader investigation of their feasibility. This paper explores the potential of applying a neural network based technology to a driver
model within a vehicle simulation instead of the traditional proportional-integral (PI) control methods. The artificial neural network applied here can learn the driving style of the driver and can be used in both simulation and virtual testing scenarios. The aim of this paper is to demonstrate the use of neural network to replace the PI controller throttle signal in a vehicle simulation driver model. In this novel approach, the artificial neural network can learn real driver behavior resulting in a more realistic driver model in vehicle simulation further advancing the accuracy of the simulation.
References
Ficzere, P. (2023). The role of artificial intelligence in the development of rail transport. Cognitive Sustainability, 2(4). DOI: 10.55343/cogsust.81
Hermansdorfer, L., Trauth, R., Betz, J., Lienkamp, M. (2020). End-to-End Neural Network for Vehicle Dynamics Modeling. 2020 6th IEEE Congress on Information Science and Technology (CiSt). Agadir–Essaouira, Morocco. 407–412. DOI: 10.1109/CiSt49399.2021.9357196
Huang, X., Sun, J., Sun, J. (2018). A car-following model considering asymmetric driving behavior based on long short-term memory neural networks. Transportation Research Part C: Emerging Technologies. 95, 346–362. DOI: 10.1016/j.trc.2018.07.022
Ioannou, P., Xu, Z. (1994). Throttle And Brake Control Systems For Automatic Vehicle Following. UC Berkeley: California Partners for Advanced Transportation Technology. URL: https://escholarship.org/uc/item/1vb6380h
Lee, H., Kim, H., Choi, S. (2021). Driving Skill Modeling Using Neural Networks for Performance-Based Haptic Assistance. IEEE Transactions on Human-Machine Systems. 51(3), 198–210. DOI: 10.1109/THMS.2021.3061409
MacAdam, C., Bareket, Z., Fancher, P., Ervin, R. (1998). Using neural networks to identify driving style and headway control behavior of drivers. Vehicle System Dynamics. 29 (sup1). DOI: 10.1080/00423119808969557
Pettersson, P., Jacobson, B., Bruzelius, F., Johannesson, P. Fast, L.(2020). Intrinsic differences between backward and forward vehicle simulation models. IFAC-PapersOnLine, 53(2), 14292–14299. DOI: 10.1016/j.ifacol.2020.12.1368
Rana, K., Khatri, N. (2024). Automotive intelligence: Unleashing the potential of AI beyond advance driver assisting system, a comprehensive review. Computers and Electrical Engineering. 117, 109237. DOI: 10.1016/j.compeleceng.2024.109237
Tollner, D., Cao, H., Zöldy, M. (2019). Artificial Intelligence based Decision Making of Autonomous Vehicles Before Entering Roundabout. IEEE 19th International Symposium on Computational Intelligence and Informatics and 7th IEEE International Conference on Recent Achievements in Mechatronics, Automation, Computer Sciences and Robotics (CINTI-MACRo), Szeged, Hungary. 181–186, DOI: 10.1109/CINTIMACRo49179.2019.9105322
Tselentis, D. I., Papadimitriou, E. (2023). Driver Profile and Driving Pattern Recognition for Road Safety Assessment: Main Challenges and Future Directions. IEEE Open Journal of Intelligent Transportation Systems. 4, 83–100. DOI: 10.1109/OJITS.2023.3237177
Zöldy, M., Szalmáné Csete, M., Kolozsi, P. P., Bordás, P., Török, Á. (2022). Cognitive Sustainability. Cognitive Sustainability. 1(1). DOI: 10.55343/cogsust.7